Makoto Kaneko

Cell Exercise
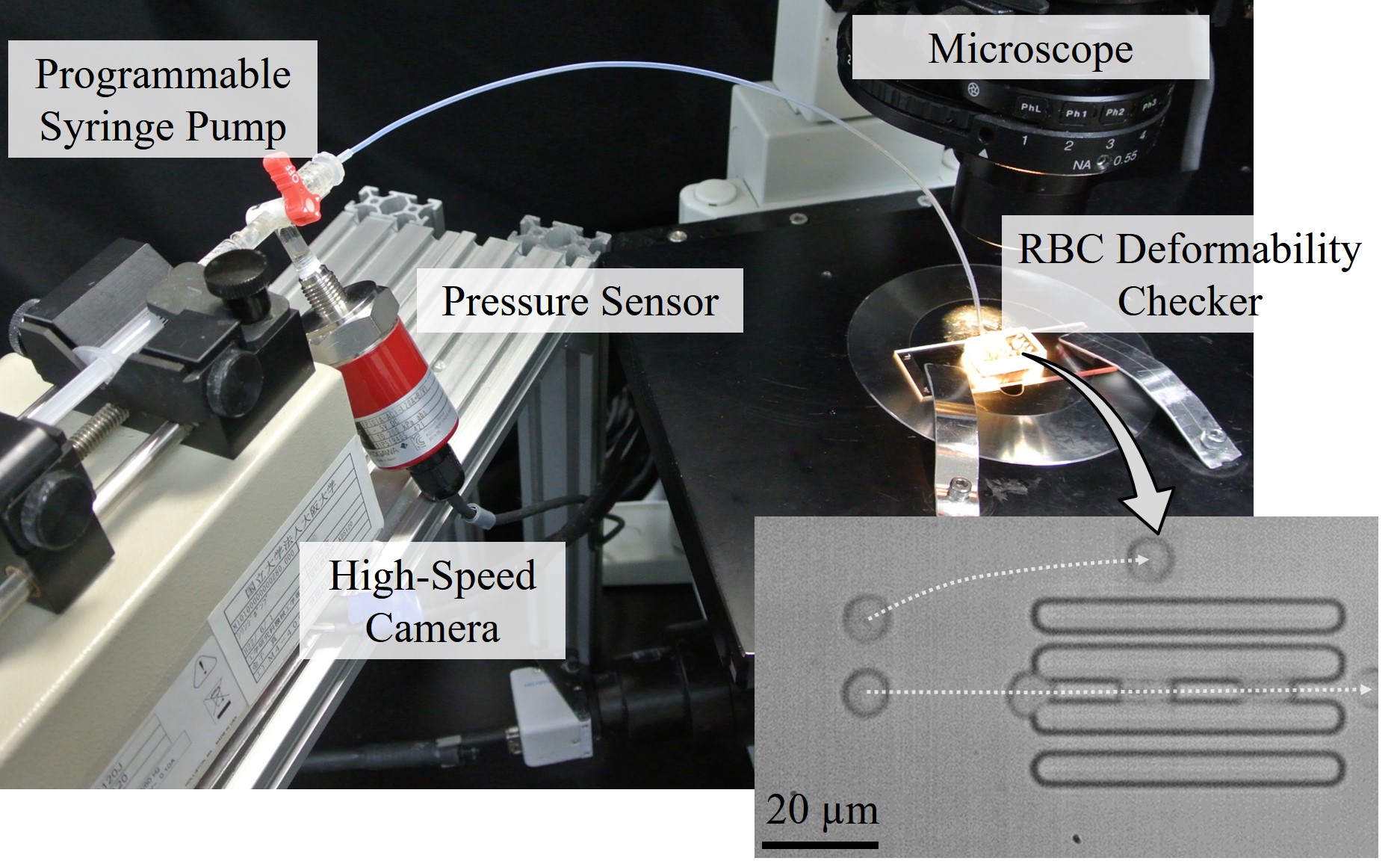
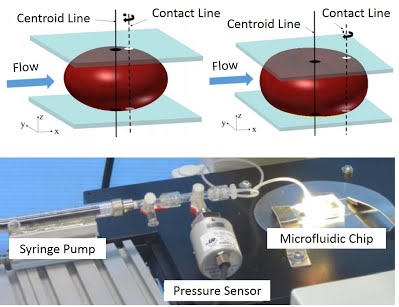
RBC Deformability Checker
Cell Pinball
Cell Fatigue Test
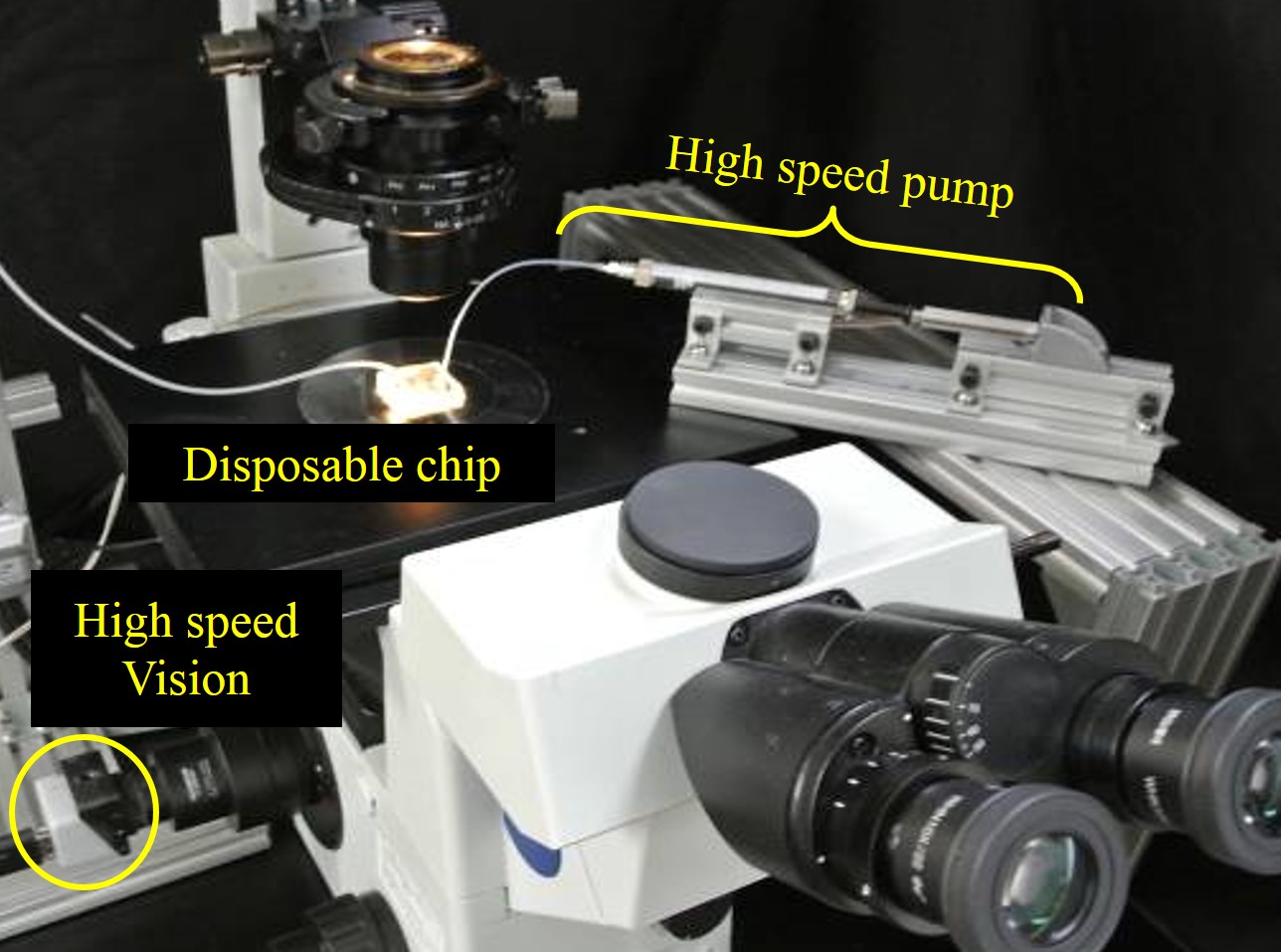
High-Speed Cell Manipulation
100mPa Cell Manipulation
Cell Tracking
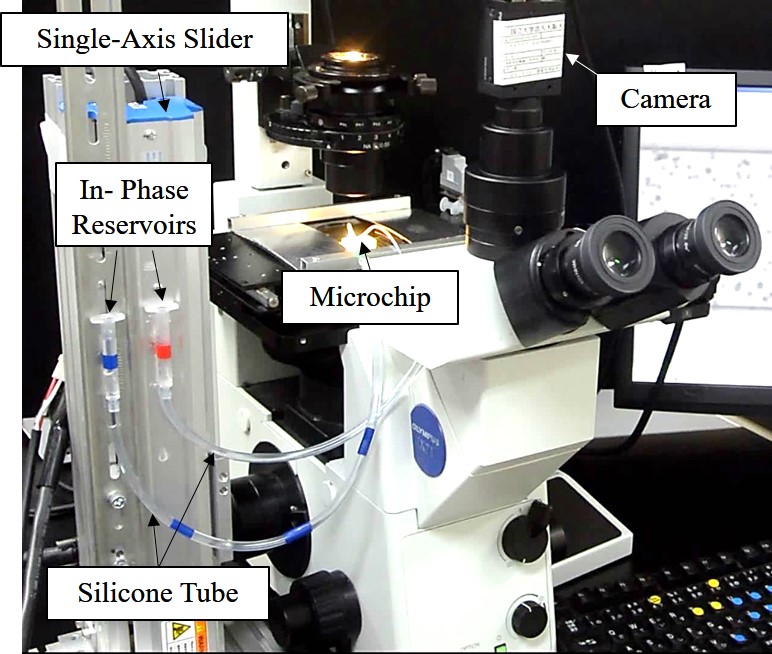
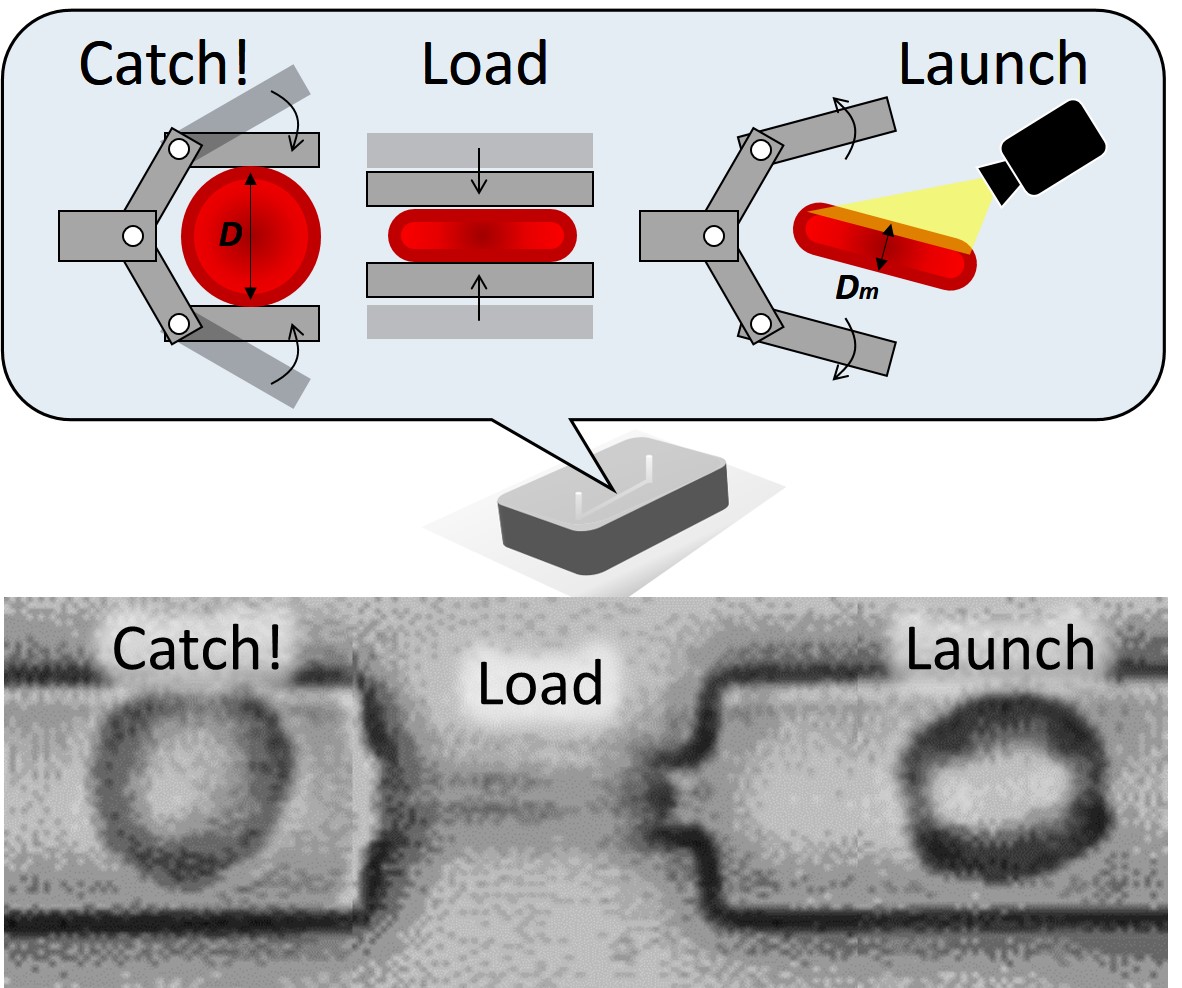
On-Chip Catch-Load-Launch
On-Chip Blood Separation
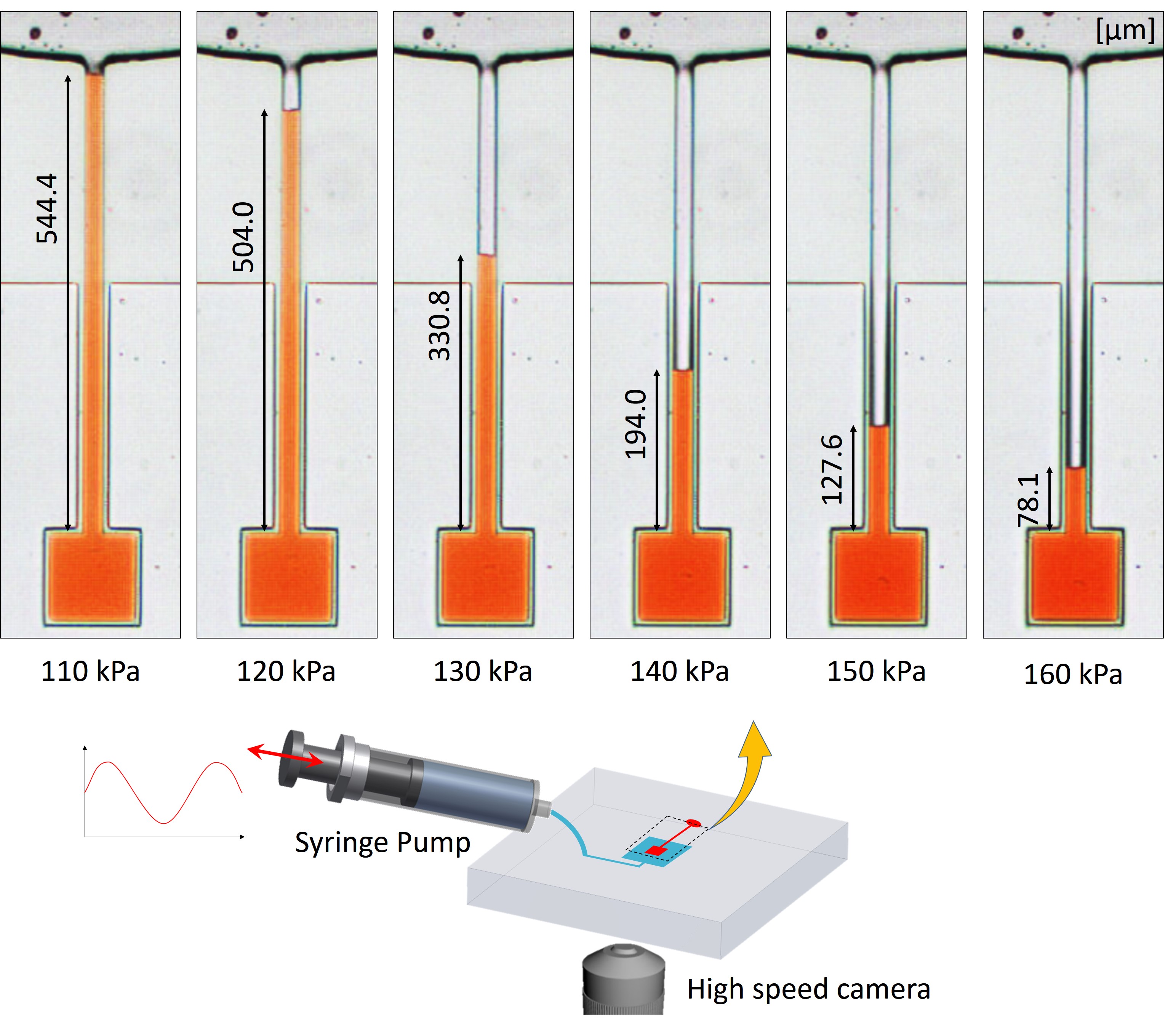
On-Chip Pressure Sensor
How to Contact Me
List of Achievements
Innovative Biomarker and Applications
Kaneko Higashimori Laboratory
Department of Mechanical Engineering
Graduate School of Information Engineering
Osaka University